Contents
2 Features
3 License
4 Building and installing the library
4.1 Configure and generate the native tool files
4.2 Building the library
4.3 Installing the library
4.4 CMake Options
5 Using ReactPhysics3D in your application
6 The PhysicsCommon object
7 Memory Management
8 Physics World
8.1 Creating the Physics World
8.2 Customizing the Physics World
8.3 Updating the Physics World
8.4 Retrieving contacts
8.5 Destroying the Physics World
9 Rigid Body
9.1 Creating a Rigid Body
9.2 Type of a Rigid Body (static, kinematic or dynamic)
9.3 Gravity
9.4 Velocity Damping
9.5 Sleeping
9.6 Applying Force or Torque to a Rigid Body
9.7 Updating a Rigid Body
9.8 Mass, Center of Mass, Inertia Tensor
9.9 Restricting linear/angular motion of a Rigid Body
9.10 Destroying a Rigid Body
10 Collider
10.1 Collision Shapes
10.2 Collision filtering
10.3 Material
10.4 Simulation Collider
10.5 World Query Collider
10.6 Trigger
11 Joints
11.1 Ball and Socket Joint
11.2 Hinge Joint
11.3 Slider Joint
11.4 Fixed Joint
11.5 Collision between the bodies of a Joint
11.6 Destroying a Joint
12 Ray casting
12.1 Ray casting against multiple bodies
12.2 Ray casting against a single body
12.3 Ray casting against the collider of a body
13 Testbed application
14 Receiving Feedback
14.1 Contacts
14.2 Triggers
15 Profiler
16 Logger
17 Debug Renderer
18 Determinism
19 API Reference Documentation
20 Issues
1 Introduction
ReactPhysics3D is an open source C++ physics engine library that can be used in 3D simulations and games. The library is released under the ZLib license.
2 Features
The ReactPhysics3D library has the following features:
-
Rigid body dynamics
-
Discrete collision detection
-
Collision shapes (Sphere, Box, Capsule, Convex Mesh, Static Concave Mesh, Height Field)
-
Multiple collision shapes per body
-
Broadphase collision detection (Dynamic AABB tree)
-
Narrowphase collision detection (SAT/GJK)
-
Collision response and friction (Sequential Impulses Solver)
-
Joints (Ball and Socket, Hinge, Slider, Fixed)
-
Collision filtering with categories
-
Ray casting
-
Sleeping technique for inactive bodies
-
Multi-platform (Windows, Linux, Mac OS X)
-
No external libraries (do not use STL containers)
-
Documentation (user manual and Doxygen API)
-
Testbed application with demos
-
Integrated profiler
-
Debug renderer
-
Logs
-
Unit tests
3 License
The ReactPhysics3D library is released under the open-source ZLib license. For more information, read the "LICENSE" file.
4 Building and installing the library
In order to build the library on your system, you first need to clone the code repository with
the following command:
git clone https://github.com/DanielChappuis/reactphysics3d.git
Note that the git versioning software needs to be installed on your system.
Then, you will need to build (compile) the library and install it on your system in order to
use it in your project. The best way is to use CMake for that. CMake will generate the
necessary files on your platform (Windows, OS X or Linux) to build the library.
CMake can be downloaded at http://www.cmake.org or using your
package-management program (apt, yum, …) on Linux. If you have never used CMake before,
you should read the page http://www.cmake.org/cmake/help/runningcmake.html as
it contains a lot of useful information.
The remaining of this section will describe how to build and install the library with
CMake.
4.1 Configure and generate the native tool files
Now we need to configure CMake to tell it what you want to build. Maybe you simply want to build the library in debug or release mode or maybe you also want to build the unit tests or the testbed application with demos. At the end of this step, CMake will generate the native build tool files on your platform that you will use to build the library. For instance, it can generate a Visual Studio solution on Windows, a XCode project on OS X or files for the make command on OS X or Linux.
4.1.1 Configure and generate with the command line (Linux and Mac OS X)
First, we will see how to configure CMake and generate the native build tool files using the
CMake tool with the command line. First, you need to create a folder where you want to
build the library. Then go into that folder and run the following ccmake command:
ccmake <path_to_library_source>
where <path_to_library_source> must be replaced by the path to the reactphysics3d/ folder of the repository you have cloned. It is the folder that contains the
CMakeLists.txt file of ReactPhysics3D. Running this command will launch the CMake
command line interface. Hit the ’c’ key to configure the project. There, you can
also change some predefined options (see section 4.4 for more details) and then,
hit the ’c’ key again to configure the build. Once you have set all the values as
you like, you can hit the ’g’ key to generate the native build tool files in the build
directory that you have created before. Finally, you can exit the CMake interface.
4.1.2 Configure and generate using the CMake graphical interface (Linux, Mac OS X and Windows)
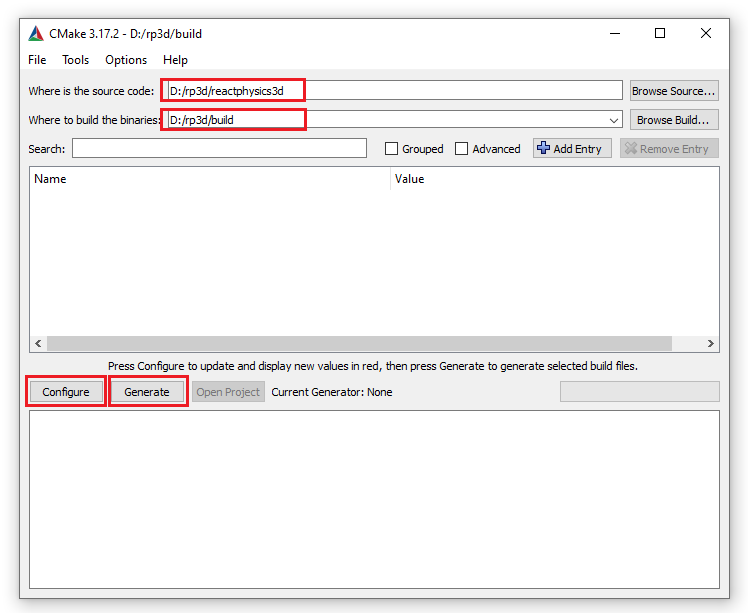
If your prefer, you can use the graphical user interface of CMake instead. To do this,
run the cmake-gui program. First, the program will ask you for the source folder.
You need to select the reactphysics3d/ folder of the repository you have
cloned. You will also have to select a folder where you want to build the library.
Select any empty folder that is on your system. Then, you can click on Configure.
CMake will ask you to choose an IDE that is on your system that will be used to
compile the library. For instance, you can select Visual Studio, Qt Creator, XCode, ...
Then, click on the Finish button. Then, you can change the compilation options.
See section 4.4 to see what are the possible options. Once this is done, click on
Configure again and finally on Generate as you can see in the following picture.
Now, if you go into the folder you have chosen to build the library, you should find the native build tool files that you will use to build the library on your platform.
4.2 Building the library
Now, that you have generated the native build tool files on your system, you will need to build (compile) the library.
4.2.1 Building the library using make on the command line (Linux, Mac OS X)
On Linux or Mac OS X, you can compile the library on the command line using the make
command. Go into the directory where you have generated the native build tool files and run
the following command:
make
The library will start compiling.
4.2.2 Building the library with Visual Studio (Windows)
If you have generated the native build tool files in the previous step on Windows, you should have obtained a Visual Studio solution of ReactPhysics3D. Now, you can open the Visual Studio solution (.sln file). Once Visual Studio is open, you first need to change the compilation mode to Release at the top instead of Debug. Then, right click on the reactphysics project in the Solution Explorer and click on Build in order to compile the library (see the following picture).
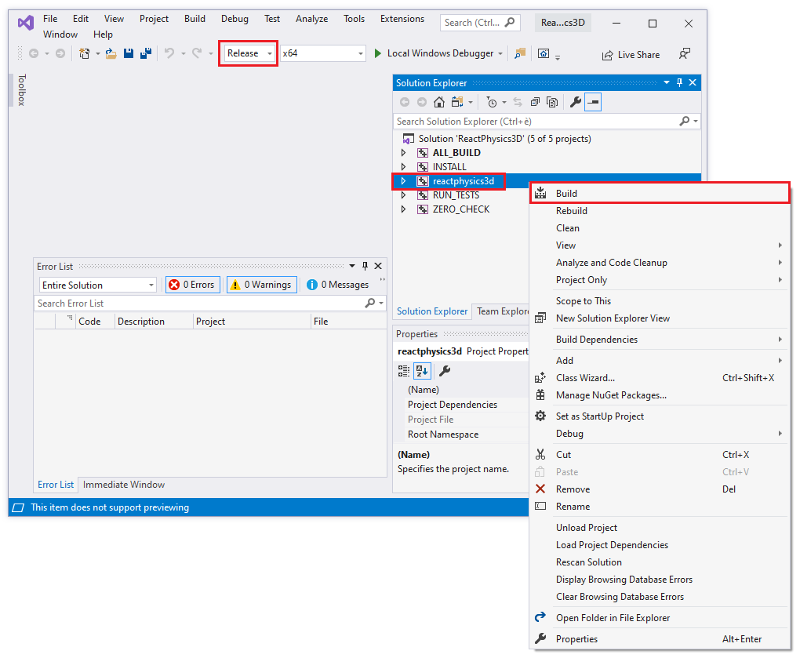
The library will start compiling.
4.3 Installing the library
Now that you have compiled the library, you can install it on your system in order to put the compiled library file, the header files and the exported CMake targets in a standard location on your system so that it can be easily imported into your project.
4.3.1 Installing the library using the make on the command line (Linux, Mac OS X)
On Linux or Mac OS X, you can use the make command to install the library. You simply
need to run the following command:
sudo make install
The library is now installed on your system. For instance, On Linux Ubuntu, the library may have been installed in the /usr/local/lib/ folder and the header files in the /usr/local/include/ folder.
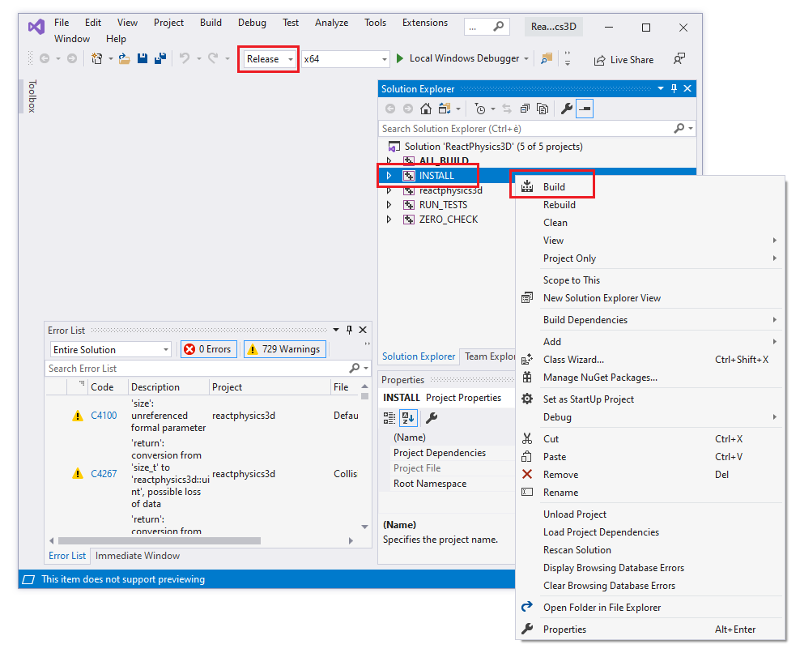
4.3.2 Installing the library on Windows with Visual Studio
In order to install the library on your system using Visual Studio, you need to open Visual
Studio with administrator rights. This is needed in order to have the correct rights to write the
files in the C:\Program Files (x86)\ folder on your computer for instance. To do that,
type Visual Studio in the Start Menu, when Visual Studio has been found, right click on it
and click on Run as administrator. This will open Visual Studio with administrator rights.
Then, you need to open the Visual Studio solution (.sln file) of ReactPhysics3D that has been generated previously with CMake. To do that, click on File in the top menu of Visual Studio, then on Open and Project/Solution.... Then, you need to select the ReactPhysics3D Visual Studio solution (.sln file) on your system. Once the solution is open, you first need to change the mode at the top to Release instead of Debug. Then, right click on the INSTALL project in the Solution Explorer menu and click on Build (see the following picture). This will install the ReactPhysics3D library in a standard location on your system like C:\Program Files (x86)\ReactPhysics3D\ for instance.
4.4 CMake Options
You can find below the different CMake options that you can set before building the library:
-
CMAKE_BUILD_TYPE
-
If this variable is set to Debug, the library will be compiled in debugging mode. This mode should be used during development stage to know where things might crash. In debugging mode, the library might run a bit slow due to all the debugging information and asserts. However, if this variable is set to Release, no debugging information is generated and therefore, it will run much faster. This mode must be used when you compile the final release of your application.
-
RP3D_COMPILE_TESTBED
-
If this variable is ON, the tesbed application with demos will be compiled. The testbed application uses OpenGL for rendering. Take a look at the section 13 for more information about the testbed application.
-
RP3D_COMPILE_TESTS
-
If this variable is ON, the unit tests of the library will be compiled. You will then be able to launch the tests to make sure that they are running fine on your system.
-
RP3D_PROFILING_ENABLED
-
If this variable is ON, the integrated profiler will collect data during the execution of the application. This might be useful to see which part of the ReactPhysics3D library takes time during its execution. This variable must be set to OFF when you compile the final release of your application. You can find more information about the profiler in section 15.
-
RP3D_DOUBLE_PRECISION_ENABLED
-
If this variable is ON, the library will be compiled with double floating point precision. Otherwise, the library will be compiled with single precision.
5 Using ReactPhysics3D in your application
If you have built and installed the ReactPhysics3D on your system with CMake as explained in the section 4, it is easy to import the library in your project. You probably already have a CMakeLists.txt file for your project. Therefore, to import the ReactPhysics3D library, you simply need to add the following line in the CMakeLists.txt file of your project.
This will tell CMake to find the installed ReactPhysics3D library on your system and import the library file and headers so that you can link it to your project. Note that if you are working on Windows or Mac OS X, you might need to use the following code in your CMakeLists.txt file before calling the previous function. This will help CMake to find the installed ReactPhysics3D library on Windows or Mac OS X.
list(APPEND CMAKE_PREFIX_PATH "C:\\Program Files (x86)\\ReactPhysics3D")
elseif(APPLE)
list(APPEND CMAKE_PREFIX_PATH "/usr/local/lib/cmake/ReactPhysics3D")
endif()
Then, you need to tell CMake that your project (executable) depends on ReactPhysics3D with the following line in your CMakeLists.txt file:
The ReactPhyscis3D repository contains a folder with an Hello World project
here. In this folder, you can find a CMakeLists.txt and a Main.cpp file
that show how to import and use the ReactPhysics3D library in a simple project.
Here is the example CMakeLists.txt file of the Hello World project:
cmake_minimum_required(VERSION 3.8)
# Help CMake to find the installed library on Windows or Mac OS X
if(WIN32)
list(APPEND CMAKE_PREFIX_PATH "C:\\Program Files (x86)\\ReactPhysics3D")
elseif(APPLE)
list(APPEND CMAKE_PREFIX_PATH "/usr/local/lib/cmake/ReactPhysics3D")
endif()
# Import the ReactPhysics3D library
find_package(ReactPhysics3D REQUIRED)
# Project
project(HelloWorld)
# Create the executable
add_executable(helloworld Main.cpp)
# Link with the ReactPhysics3D library
target_link_libraries(helloworld ReactPhysics3D::ReactPhysics3D)
Then in your C++ source file, you need to include the main ReactPhysics3D header file
with the following line:
Also note that all the classes of the library are available in the reactphysics3d
namespace or its shorter alias rp3d. Therefore, you can use this namespace in your code
with the following declaration:
Here is the Main.cpp file of the Hello World project:
#include <reactphysics3d/reactphysics3d.h>
#include <iostream>
// ReactPhysics3D namespace
using namespace reactphysics3d;
// Main function
int main(int argc, char** argv) {
// First you need to create the PhysicsCommon object.
// This is a factory module that you can use to create physics
// world and other objects. It is also responsible for
// logging and memory management
PhysicsCommon physicsCommon;
// Create a physics world
PhysicsWorld* world = physicsCommon.createPhysicsWorld();
// Create a rigid body in the world
Vector3 position(0, 20, 0);
Quaternion orientation = Quaternion::identity();
Transform transform(position, orientation);
RigidBody* body = world->createRigidBody(transform);
const decimal timeStep = 1.0f / 60.0f;
// Step the simulation a few steps
for (int i=0; i < 20; i++) {
world->update(timeStep);
// Get the updated position of the body
const Transform& transform = body->getTransform();
const Vector3& position = transform.getPosition();
// Display the position of the body
std::cout << "Body Position: (" << position.x << ", " <<
position.y << ", " << position.z << ")" << std::endl;
}
return 0;
}
6 The PhysicsCommon object
The first thing you need to do when you want to use ReactPhysics3D is to instantiate the
PhysicsCommon class. This main object will then be used as a factory to instantiate one or
multiple physics worlds and other objects. This class is also responsible for the memory
management of the library. All the memory allocations are centralized into this
PhysicsCommon object. This class also contains the logger for the different events that can
occur.
In order to use ReactPhysics3D, you have to create an instance of the PhysicsCommon
class:
Then, you can use this object to instantiate a physics world for instance:
When you will need to add a body into your world, you will probably need to
create a collider with a given type of collision shape. Again, you will need to use the
PhysicsCommon object to instantiate a collision shape as in the following example:
SphereShape* sphereShape = physicsCommon.createSphereShape(radius);
As you can see, the PhysicsCommon object is the first thing you will need to instantiate in order to use ReactPhycsi3D in your code.
7 Memory Management
The PhysicsCommon class is responsible for all the memory allocations that occur in
ReactPhysics3D. The base memory allocations in ReactPhysics3D are done by default
using the std::malloc() and std::free() methods. If you want to use your own behavior
to allocate and free memory, you can pass a custom memory allocator to the constructor of
the PhysicsCommon object. You simply need to create a class that inherits from the
MemoryAllocator class of ReactPhysics3D and overrides the allocate() and release()
methods.
Note that the allocated memory returned by the allocate() method must be 16 bytes
aligned.
Note that several methods of ReactPhysics3D will create an instance of an
object and return a pointer so that you can use that object. This the case for the
creation of a PhysicsWorld or a RigidBody as you can see in the following code:
PhysicsWorld* world = physicsCommon.createPhysicsWorld();
...
// Create a rigid body
RigidBody* body = world->createRigidBody(transform);
Note that because those objects have been instantiated by ReactPhysics3D and not by
you, the library is responsible to delete those objects. Therefore, you must not call the C++
delete operator on those objects. There are methods that you can call to destroy those
objects when you do not need them anymore to release memory but if you don’t do it, the
library will do it for you when the PhysicsCommon object is deleted. The following
example shows how to destroy previously created RigidBody and PhysicsWorld:
world->destroyRigidBody(body);
...
// Destroy a physics world
physicsCommon.destroyPhysicsWorld(world);
8 Physics World
Once you have created a PhysicsCommon object (see section 6), you will have to create a
physics world. A physics world is a place where you can add the bodies that you want to
simulate. It is possible to create multiple physics worlds but you will probably never need
more than one.
-
testOverlap()
-
This group of methods can be used to test whether the colliders of two bodies overlap or not. You can use this if you just want to know if bodies are colliding but your are not interested in the contact information.
-
testCollision()
-
This group of methods will give you the collision information (contact points, normals, ...) for colliding bodies.
-
testPointInside()
-
This method will tell you if a 3D point is inside a RigidBody or Collider.
The second way to use the library is to create bodies and let ReactPhysics3D animate their motions automatically using the laws of physics. This is done by creating rigid bodies (class RigidBody) in your physics world and by updating the simulation by calling the PhysicsWorld::update() method each frame. The rigid bodies will move according to the forces, collision between bodies and joint constraints of the physics world. A typical use case is a 3D real-time game for instance.
8.1 Creating the Physics World
In order to create a physics world, you need to call the createPhysicsWorld() method of
the main PhysicsCommon object:
This method will return a pointer to the physics world that has been created.
8.1.1 World settings
When you create a physics world as in the previous example, it will have some
default settings. If you want to customize some settings, you need to create a
PhysicsWorld::WorldSettings object and give it in parameter when you create your
physics world as in the following example:
PhysicsWorld::WorldSettings settings;
settings.defaultVelocitySolverNbIterations = 20;
settings.isSleepingEnabled = false;
settings.gravity = Vector3(0, -9.81, 0);
// Create the physics world with your settings
PhysicsWorld* world = physicsCommon.createPhysicsWorld(settings);
The settings are copied into the world at its creation. Therefore, changing the values of your
PhysicsWorld::WorldSettings instance after the world creation will not have any effect.
However, some methods are available to change settings after the world creation. You can
take a look at the API documentation to see what world settings can be changed in the
PhysicsWorld class.
8.2 Customizing the Physics World
8.2.1 Solver parameters
ReactPhysics3D uses an iterative solver to simulate the contacts and joints. For contacts,
there is a unique velocity solver and for joints there is a velocity and a position solver. By
default, the number of iterations of the velocity solver is 10 and the number of iterations for
the position solver is 5. It is possible to change the number of iterations for both solvers.
To do this, you need to use the following two methods:
world->setNbIterationsVelocitySolver(15);
// Change the number of iterations of the position solver
world->setNbIterationsPositionSolver(8);
Increasing the number of iterations of the solvers will make the simulation more precise but also more expensive to compute. Therefore, you should change those values only if necessary.
8.2.2 Sleeping
The purpose of the sleeping technique is to deactivate resting bodies so that they are not
simulated anymore. This is used to save computation time because simulating many bodies
is costly. A sleeping body (or group of sleeping bodies) is awaken as soon as
another body collides with it or a joint in which it is involed is enabled. The sleeping
technique is enabled by default. You can disable it using the following method:
Note that it is not recommended to disable the sleeping technique because the
simulation might become slower. It is also possible to deactivate the sleeping technique on a
per body basis. See section 9.5 for more information.
A body is put to sleep when its linear and angular velocity stay under a given velocity threshold for a certain amount of time (one second by default). It is possible to change the linear and angular velocity thresholds using the two methods PhysicsWorld::setSleepLinearVelocity() and PhysicsWorld::setSleepAngularVelocity(). Note that the velocities must be specified in meters per second. You can also change the amount of time (in seconds) the velocity of a body needs to stay under the threshold to be considered sleeping. To do this, use the PhysicsWorld::setTimeBeforeSleep() method.
8.3 Updating the Physics World
When the PhysicsWorld is used to animate the bodies through time according to the laws
of physics, the world has to be updated each time you want to simulate a step forward in
time (for instance each frame in a real-time simulation).
To update the physics world, you need to use the PhysicsWorld::update() method.
This method will perform collision detection and update the position and orientation of the
bodies according to the forces, joints constraints and collision contacts. Once you have
updated the world, you will be able to retrieve the new position and orientation of your
bodies in order to render the next frame. The PhysicsWorld::update() method requires a
timeStep parameter. This is the amount of time you want to advance the physics simulation
(in seconds).
The smaller the time step you pick, the more precise the simulation will be.
For a real-time application, you probably want to use a time step of at most  seconds to have at least a 60 Hz framerate. Most of the time, physics engines
prefer to work with a constant time step. It means that you should always call the
PhysicsWorld::update() method with the same time step parameter. You do not want to
use the exact time between two frames as your time step because it will not be constant.
seconds to have at least a 60 Hz framerate. Most of the time, physics engines
prefer to work with a constant time step. It means that you should always call the
PhysicsWorld::update() method with the same time step parameter. You do not want to
use the exact time between two frames as your time step because it will not be constant.
You can use the following technique. First, you need to choose a constant time step.
Let say the time step is  seconds. Then, at each frame, you compute the time
difference between the current frame and the previous one and you accumulate this
difference in a variable called accumulator. The accumulator is initialized to zero at the
beginning of your application and is updated at each frame. The idea is to divide
the time in the accumulator in several constant time steps. For instance, if your
accumulator contains 0.145 seconds, it means that we can take 8 physics steps of
seconds. Then, at each frame, you compute the time
difference between the current frame and the previous one and you accumulate this
difference in a variable called accumulator. The accumulator is initialized to zero at the
beginning of your application and is updated at each frame. The idea is to divide
the time in the accumulator in several constant time steps. For instance, if your
accumulator contains 0.145 seconds, it means that we can take 8 physics steps of
 seconds during the current frame. Note that 0.012 seconds will remain in the
accumulator and will probably be used in the next frame. As you can see, with
this technique, multiple physics steps can be taken at each frame. It is important
to understand that each call to the PhysicsWorld::update() method is done
using a constant time step that is not varying with the framerate of the application.
seconds during the current frame. Note that 0.012 seconds will remain in the
accumulator and will probably be used in the next frame. As you can see, with
this technique, multiple physics steps can be taken at each frame. It is important
to understand that each call to the PhysicsWorld::update() method is done
using a constant time step that is not varying with the framerate of the application.
Here is what the code looks like at each frame:
// Constant physics time step
const float timeStep = 1.0f / 60.0f;
// Get the current system time
long double currentFrameTime = getCurrentSystemTime();
// Compute the time difference between the two frames
long double deltaTime = currentFrameTime - previousFrameTime;
// Update the previous time
previousFrameTime = currentFrameTime;
// Add the time difference in the accumulator
accumulator += mDeltaTime;
// While there is enough accumulated time to take
// one or several physics steps
while (accumulator >= timeStep) {
// Update the Dynamics world with a constant time step
world->update(timeStep);
// Decrease the accumulated time
accumulator -= timeStep;
}
If you want to know more about physics simulation time interpolation, you can read the nice article from Glenn Fiedler at https://gafferongames.com/post/fix_your_timestep/.
8.4 Retrieving contacts
Sometimes, you might need to get the contacts information (contact point, normal,
penetration depth, …) that occurs in your physics world.
If you are using a physics world to only test for collisions (you never call the
PhysicsWorld::update() method), you can retrieve contacts information directly when you
call the PhysicsWorld::testCollision() group of methods. Those methods take a
pointer to a CollisionCallback class. You simply need to create a custom class that
inherits from this class and override the CollisionCallback::onContact() method. When
you call one of the PhysicsWorld::testCollision() methods, the onContact() method
of your class will be called with all the information about the contacts in parameters.
However, if you are using ReactPhysics3D for a real-time simulation by calling the PhysicsWorld::update() method each frame, you should use the EventListener class to retrieve contacts as described in section 14.
8.5 Destroying the Physics World
When you don’t need the physics world anymore, you can destroy it to release some
memory. When the physics world is destroyed, all the bodies that have been added into it
and that have not been destroyed already will be destroyed.
Note that the pointer to the physics world and all the objects that have been created inside it (bodies, colliders, …) will become invalid after this call.
9 Rigid Body
Once the physics world has been created, you can add rigid bodies into it. A rigid body is an object that can be simulated using the laws of physics. It has a mass, a position, an orientation and one or several colliders. A rigid body can be used in different situations. It can be used to simulate a real world object simulated by the laws of physics (it will react to forces and collisions) or moved manually (like a character). It can also be used to represent a static objects that is not moving in the world (like a building for instance). We can also use a rigid body that is not simulated but there to launch a given action when colliding or overlapping with another rigid body of the world. In ReactPhysics3D, the RigidBody class is used to describe a rigid body.
9.1 Creating a Rigid Body
In order to create a rigid body, you need to specify its transform. The transform describes
the initial position and orientation of the body in the world. You need to create an instance of
the Transform class with a vector describing the initial position and a quaternion for the
initial orientation of the body.
You have to call the PhysicsWorld::createRigidBody() method to create a rigid body
in the world. This method will return a pointer to the instance of the RigidBody object that
has been created internally. You will then be able to use that pointer to get or set values to
the body.
You can see in the following code how to create a rigid body in your world:
Vector3 position(0.0, 3.0, 0.0);
Quaternion orientation = Quaternion::identity();
Transform transform(position, orientation);
// Create a rigid body in the world
RigidBody* body = world->createRigidBody(transform);
Once your rigid body has been created in the world, you will probably want to add it one or more colliders as described in section 10.
9.2 Type of a Rigid Body (static, kinematic or dynamic)
There are three types of bodies: static, kinematic and dynamic.
A static body has infinite mass, zero velocity but its position can be changed manually.
Moreover, a static body does not collide with other static or kinematic bodies.
On the other side, a kinematic body has infinite mass, its velocity can be changed
manually and its position is computed by the physics engine. A kinematic body does not
collide with other static or kinematic bodies.
Finally, A dynamic body has non-zero mass, non-zero velocity determined by forces and
its position is determined by the physics engine. Moreover, a dynamic body can collide with
other dynamic, static or kinematic bodies.
For instance, you can use a static body for the floor, a kinematic body for a moving
platform and a dynamic body for a rock that could fall on the floor.
When you create a new body in the world, it is of dynamic type by default. You
can change the type of the body using the RigidBody::setType() method as
follows:
9.3 Gravity
By default, all the rigid bodies with react to the gravity force of the world. If you do
not want the gravity to be applied to a given body, you can disable it using the
RigidBody::enableGravity() method as in the following example:
9.4 Velocity Damping
Damping is the effect of reducing the velocity of the rigid body during the simulation to simulate effects like air friction for instance. By default, no damping is applied. However, you can choose to damp the linear or/and the angular velocity of a rigid body. For instance, without angular damping a pendulum will never come to rest. You need to use the RigidBody::setLinearDamping() and RigidBody::setAngularDamping() methods to change the damping values. The damping value has to be positive and a value of zero means no damping at all.
9.5 Sleeping
As described in section 8.2.2, the sleeping technique is used to disable the simulation of
resting bodies. By default, the bodies are allowed to sleep when they come to
rest. However, if you do not want a given body to be put to sleep, you can use the
RigidBody::setIsAllowedToSleep() method as in the next example:
9.6 Applying Force or Torque to a Rigid Body
During the simulation, you can apply a force or a torque to a given rigid body.
This force can be applied to the center of mass of the rigid body by using the
RigidBody::applyForceToCenterOfMass() method. You need to specify the force
vector (in Newton) as a parameter. If the force is applied to the center of mass,
no torque will be created and only the linear motion of the body will be affected.
Vector3 force(2.0, 0.0, 0.0);
// Apply a force to the center of the body
rigidBody->applyForceToCenterOfMass(force);
You can also apply a force to any given point in world-space using the
RigidBody::applyForceAtWorldPosition() method or in local-space with the
RigidBody::applyForceAtLocalPosition() method. You need to specify the
force vector (in Newton) and the point where to apply the given force. Note that
if the point is not the center of mass of the body, applying a force will generate
some torque and therefore, the angular motion of the body will be affected as well.
Vector3 force(2.0, 0.0, 0.0);
// Point where the force is applied
Vector3 point(4.0, 5.0, 6.0);
// Apply a force to the body
rigidBody->applyForceAtLocalPosition(force, point);
It is also possible to apply a torque to a given body using the RigidBody::applyTorque()
method. You simply need to specify the torque vector (in Newton ⋅ meter) as in the following
example:
Vector3 torque(0.0, 3.0, 0.0);
// Apply a torque to the body
rigidBody->applyTorque(torque);
Note that when you call the previous methods, the specified force/torque will be added to the total force/torque applied to the rigid body and that at the end of each call to the PhysicsWorld::update(), the total force/torque of all the rigid bodies will be reset to zero. Therefore, you need to call the previous methods during several frames if you want the force/torque to be applied during a certain amount of time.
9.7 Updating a Rigid Body
When you call the PhysicsWorld::update() method, the bodies positions and orientations
are updated to satisfy the contacts and joints constraint between the bodies. After calling
this method, you can retrieve the updated position and orientation of each body to render it.
To do that, you simply need to use the RigidBody::getTransform() method to get the
updated transform. This transform represents the current local-to-world-space transform of
the body.
As described in section 8.3, at the end of a frame, there might still be some remaining
time in the time accumulator. Therefore, you should not use the updated transform directly
for rendering but you need to perform some interpolation between the updated transform
and the one from the previous frame to get a smooth real-time simulation. First, you need to
compute the interpolation factor as folows:
Then, you can use the Transform::interpolateTransforms() method to compute the
linearly interpolated transform:
Transform interpolatedTransform = Transform::interpolateTransforms(prevTransform, currTransform, factor);
The following code is the one from section 8.3 for the physics simulation loop but with the
update of a given rigid body.
// Constant physics time step
const float timeStep = 1.0 / 60.0;
// Get the current system time
long double currentFrameTime = getCurrentSystemTime();
// Compute the time difference between the two frames
long double deltaTime = currentFrameTime - previousFrameTime;
// Update the previous time
previousFrameTime = currentFrameTime;
// Add the time difference in the accumulator
accumulator += mDeltaTime;
// While there is enough accumulated time to take
// one or several physics steps
while (accumulator >= timeStep) {
// Update the physics world with a constant time step
physicsWorld->update(timeStep);
// Decrease the accumulated time
accumulator -= timeStep;
}
// Compute the time interpolation factor
decimal factor = accumulator / timeStep;
// Get the updated transform of the body
Transform currTransform = body->getTransform();
// Compute the interpolated transform of the rigid body
Transform interpolatedTransform = Transform::interpolateTransforms(prevTransform, currTransform, factor);
// Now you can render your body using the interpolated transform here
// Update the previous transform
prevTransform = currTranform;
If you need the array with the corresponding 4 × 4 OpenGL transformation matrix for
rendering, you can use the Transform::getOpenGLMatrix() method as in the following
code:
float matrix[16];
transform.getOpenGLMatrix(matrix);
A nice article to read about this time interpolation is the one from Glenn Fiedler at https://gafferongames.com/post/fix_your_timestep/.
9.8 Mass, Center of Mass, Inertia Tensor
The mass, center of mass and inertia tensor of a rigid body are important parameters for the physical simulation of a rigid body.
9.8.1 Mass
The RigidBody has a mass value (in kilograms) which is 1 kilogram by default. There are two ways to set the mass of a rigid body. First, you can set it directly using the RigidBody::setMass() method. Secondly, it is also possible to compute this mass automatically using the mass of the colliders of the rigid body. As described in section 10.3, the material of each collider has a mass density value. This value is 1 by default. You change change the mass density value of the colliders of a rigid body and then use the RigidBody::updateMassFromColliders() method to automatically compute the mass of the rigid body using the mass density and shape of its colliders. Note that you will need to call this method again if you add another collider to the rigid body.
9.8.2 Center of mass
The center of mass of a RigidBody is the mean location of the distribution of mass of the body in space. By default the center of mass of the rigid body is located at its origin. There are two ways to set the center of mass of a rigid body. First, you can set it directly using the RigidBody::setLocalCenterOfMass() method. Secondly, as for the mass, the center of mass can also be computed automatically using the mass, shape and transform of all the colliders of the rigid body. As described in section 10.3, the material of each collider has a mass density value. This value is 1 by default. You can set the mass density value of the colliders and then use the RigidBody::updateLocalCenterOfMassFromColliders() method to automatically compute the center of mass of the rigid body. Note that you will need to call this method again if you add another collider to the rigid body.
9.8.3 Inertia Tensor
The inertia tensor of a RigidBody is a 3 × 3 matrix describing how the mass is distributed inside the rigid body which is used to calculate its rotation. The inertia tensor depends on the mass and the shape of the body. By default the local inertia tensor of a rigid body is the identity matrix. There are two ways to set the inertia tensor of a rigid body. First, you can set it directly using the RigidBody::setLocalInertiaTensor() method. Note that this will set the inertia tensor of the body in local-space coordinates which is usually a diagonal matrix. This method takes a Vector3 with the three diagonal entries of the matrix. Secondly, the local inertia tensor can be computed automatically using the mass density, shape and transform of all the colliders of the body. As described in section 10.3, the material of each collider has a mass density value which is 1 by default. You can set the mass density value of the colliders and then use the RigidBody::updateLocalInertiaTensorFromColliders() method to automatically compute the local inertia tensor of the body. Note that you will need to call this method again if you add another collider to the rigid body.
Note that it is also possible to automatically compute the mass, center of mass and inertia tensor of a rigid body at the same time using the RigidBody::updateMassPropertiesFromColliders().
9.9 Restricting linear/angular motion of a Rigid Body
It is possible to use the RigidBody::setLinearLockAxisFactor() method to
restrict the linear motion of a rigid body along the world-space X,Y and Z axes.
For instance, the following code shows how to disable the linear motion of a rigid
body along the world-space Y axis by setting the lock factor to zero for this axis.
In the same way, you can use the RigidBody::setAngularLockAxisFactor() method
to restrict the angular motion of a rigid body around the world-space X,Y and Z axes. For
instance, the following code shows how to disable the angular motion of a rigid
body around the world-space Y axis by setting the lock factor to zero for this axis.
9.10 Destroying a Rigid Body
It is really simple to destroy a rigid body when you don’t need it anymore. You simply need to
use the PhysicsWorld::destroyRigidBody() method. You need to use the pointer to the
body you want to destroy as a parameter. Note that after calling that method, the pointer will
not be valid anymore and therefore, you should not use it. When you destroy a rigid
body that was part of a joint, that joint will be automatically destroyed as well.
Here is how to destroy a rigid body:
// and body is a RigidBody* pointer
// Destroy the rigid body
world->destroyRigidBody(body);
10 Collider
To allow bodies to collide against each others, we need colliders. A collider (class
Collider) describes the collision shape of a body. A body can have multiple colliders
attached to it. When adding a collider to a body, you need to specify its collision
shape (box, sphere, capsule, …) and its transform relative to the origin of the body.
Before adding a collider to a body, you need to create a collision shape. A
collision shape can be instantiated by calling a method of the main PhysicsCommon
object. The following example shows how instantiate a collision shape (a sphere
shape) from the PhysicsCommon object and use it to add a new collider to a body.
float radius = 3.0f;
SphereShape* sphereShape = physicsCommon.createSphereCollisionShape(radius);
// Relative transform of the collider relative to the body origin
Transform transform = Transform::identity();
// Add the collider to the rigid body
Collider* collider;
collider = body->addCollider(&shape, transform);
Note that a given collision shape instance can be shared between multiple colliders. The next section presents the different types of collision shapes that are available in ReactPhysics3D.
10.1 Collision Shapes
As we have just seen, a collision shape is used to describe the shape of a collider for
collision detection. They are many types of collision shapes that you can use. They all
inherit from the CollisionShape class.
Note that ReactPhysics3D does not support collision between two concave shapes (ConcaveMeshShape and HeightFieldShape).
10.1.1 Box Shape
The BoxShape class describes a box collision shape centered at the origin of the collider.
The box is aligned with the shape local X, Y and Z axis. In order to create a box shape, you
only need to specify the three half extents dimensions of the box in the three X, Y and Z
directions.
For instance, if you want to create a box shape with dimensions of 4 meters, 6 meters
and 10 meters along the X, Y and Z axis respectively, you need to use the following code:
const Vector3 halfExtents(2.0, 3.0, 5.0);
// Create the box shape
BoxShape* boxShape = phycsicsCommon.createBoxShape(halfExtents);
10.1.2 Sphere Shape
The SphereShape class describes a sphere collision shape centered at the
origin of the collider. You only need to specify the radius of the sphere to create it.
For instance, if you want to create a sphere shape with a radius of 2 meters, you need to
use the following code:
SphereShape* sphereShape = physicsCommon.createSphereShape(2.0);
10.1.3 Capsule Shape

The CapsuleShape class describes a capsule collision shape around the local Y axis
and centered at the origin of the collider. It is the convex hull of two spheres. It can also be
seen as an elongated sphere. In order to create it, you only need to specify the radius of the
two spheres and the height of the capsule (distance between the centers of the two
spheres).
For instance, if you want to create a capsule shape with a radius of 1 meter and the
height of 2 meters, you need to use the following code:
CapsuleShape* capsuleShape = physicsCommon.createCapsuleShape(1.0, 2.0);
10.1.4 Convex Mesh Shape
The ConvexMeshShape class can be used to describe the shape of a convex mesh centered at the origin of the collider.
In order to create a ConvexMeshShape, we first need to create a ConvexMesh. A
ConvexMesh can be instanciated once and used to create multiple ConvexMeshShapes
with different scaling if necessary. There are two ways to create a ConvexMesh.
If you know the vertices and faces of your mesh, you can use the following method to
create a ConvexMesh:
To use this method, you need to create an array of PolygonFace to describe each face
of your mesh. You also need to have an array with the vertices coordinates and an
array with the vertex indices of each face of you mesh. Then, you have to create a
PolygonVertexArray with your vertices coordinates and indices array. You also need to
specify your array of PolygonFace. Then, you can call the previous method to instantiate a
ConvexMesh using your PolygonVertexArray.
The following example shows how to create a ConvexMeshShape when you know the
vertices and faces of your mesh. In this example, we create a cube as a convex mesh
shape. Of course, this is only for the example. If you really need a cube collision shape, you
should use the BoxShape instead.
float vertices[24] = {-3, -3, 3,
3, -3, 3,
3, -3, -3,
3, -3, -3,
-3, 3, 3,
3, 3, 3,
3, 3, -3,
-3, 3, -3};
// Vertex array with all vertices of the mesh
rp3d::VertexArray vertexArray(vertices, 3 * sizeof(float),
24, rp3d::VertexArray::DataType::VERTEX_FLOAT_TYPE);
// Compute the convex mesh from the array of vertices
std::vector<rp3d::Message> messages;
ConvexMesh* convexMesh = physicsCommon.createConvexMesh(vertexArray, messages);
// Display the messages (info, warning and errors)
if (messages.size() > 0) {
for (const rp3d::Message& message: messages) {
std::string messageType;
switch(message.type) {
case rp3d::Message::Type::Information:
messageType = "info";
break;
case rp3d::Message::Type::Warning:
messageType = "warning";
break;
case rp3d::Message::Type::Error:
messageType = "error";
break;
}
std::cout << "Message (" << messageType << "): " << message.text << std::endl;
}
}
// Make sure there was no errors during mesh creation
assert(convexMesh != nullptr);
Note that the vertex coordinates and indices array are copied into the ConvexMesh.
Therefore, you can release the memory of the PolygonVertexArray after the ConvexMesh
creation. However, the mesh data is stored inside the ConvexMesh. Therefore, you should
not release it until all the ConvexMeshShapes that have been instantiated from it are
destroyed.
You need to make sure that the mesh you provide is indeed convex. Secondly, you
should provide the simplest possible convex mesh. It means that you need to avoid coplanar
faces in your convex mesh shape. Coplanar faces have to be merged together. Remember
that convex meshes are not limited to triangular faces, you can create faces with more than
three vertices.
Also note that meshes with duplicated vertices are not supported. The number of
vertices you pass to create the PolygonVertexArray must be exactly the number of
vertices in your convex mesh. The PhysicsCommon::createConvexMesh() will also report
errors if some faces of your mesh have almost zero area (degenerated face). You will need
to fix those errors in order to create the ConvexMesh.
When you specify the vertices for each face of your convex mesh, be careful with their
order. The vertices of a face must be specified in counter clockwise order as seen from the
outside of your convex mesh.
You also need to make sure that the origin of your mesh is inside the convex mesh. A
mesh with an origin outside the convex mesh is not currently supported by the library.
As discussed before, there is a second way to create a ConvexMesh. In case you only
know the vertices of your mesh (you don’t know the faces), you can use the following
method:
With this method, you only need to specify the array of vertices (VertexArray) of your
mesh (not the faces). The library will use the QuickHull algorithm to compute a convex mesh
that includes all the vertices.
float vertices[24] = {-3, -3, 3,
3, -3, 3,
3, -3, -3,
3, -3, -3,
-3, 3, 3,
3, 3, 3,
3, 3, -3,
-3, 3, -3};
// Vertex array with all vertices of the mesh
rp3d::VertexArray vertexArray(vertices, 3 * sizeof(float),
24, rp3d::VertexArray::DataType::VERTEX_FLOAT_TYPE);
// Compute the convex mesh using only the array of vertices
std::vector<rp3d::Message> messages;
ConvexMesh* convexMesh = physicsCommon.createConvexMesh(vertexArray, messages);
// Display the messages (info, warning and errors)
if (messages.size() > 0) {
for (const rp3d::Message& message: messages) {
std::string messageType;
switch(message.type) {
case rp3d::Message::Type::Information:
messageType = "info";
break;
case rp3d::Message::Type::Warning:
messageType = "warning";
break;
case rp3d::Message::Type::Error:
messageType = "error";
break;
}
std::cout << "Message (" << messageType << "): " << message.text << std::endl;
}
}
// Make sure there was no errors during mesh creation
assert(convexMesh != nullptr);
Note that the PhysicsCommon::createConvexMesh() method takes a reference to an
array of messages as parameter. If there are errors during the convex mesh creation, the
method will return null and the array with contain some error messages describing the
issues.
Now that we have a ConvexMesh, we can create a ConvexMeshShape as in the following
example:
Vector3 scaling(1, 1, 1);
// Create the ConvexMeshShape
ConvexMeshShape* convexMeshShape = physicsCommon.createConvexMeshShape(convexMesh, scaling);
As you can see, you can specify a scaling factor in the PhysicsCommon::createConvexMeshShape()
method when you create a ConvexMeshShape. All the vertices of your mesh will be scaled
from the local origin of the mesh by this factor. It means that you can use the same
ConvexMesh for multiple ConvexMeshShape with a different scaling factor each time.
Note that collision detection with a ConvexMeshShape is more expensive than with a
SphereShape or a CapsuleShape.
10.1.5 Concave Mesh Shape
The ConcaveMeshShape class can be used for a static concave triangular mesh. It can
be used to describe an environment for instance. Note that it cannot be used with a dynamic
body that is allowed to move. Moreover, make sure to use a ConcaveMeshShape only when
you are not able to use a convex shape and also try to limit the number of triangles of that
mesh because collision detection with ConcaveMeshShape is quite expensive compared to
convex shapes. Note that collsions between two concave mesh shape are not supported.
In order to create a ConcaveMeshShape, we first need to create a TriangleMesh. A
TriangleMesh describes your mesh made of triangles and can be reused multiple times to
instantiate ConcaveMeshShapes with different scaling factors for instance. In order to create
the TriangleMesh, we first need to instantiate a TriangleVertexArray describing the
vertices and triangle faces of the mesh. We then pass the TriangleVertexArray to the
PhysicsCommon::createTriangleMesh() method to create the TriangleMesh.
When you specify the vertices for each triangle face of your mesh, be careful with the
order of the vertices. They must be specified in counter clockwise order as seen from the
outside of your mesh.
The following code shows how to create a TriangleVertexArray and use it to create a
TriangleMesh:
const int nbVertices = 8;
const int nbTriangles = 12;
float vertices[3 * nbVertices] = ...;
int indices[3 * nbTriangles] = ...;
TriangleVertexArray* triangleArray =
new TriangleVertexArray(nbVertices, vertices, 3 * sizeof(float), nbTriangles,
indices, 3 * sizeof(int),
TriangleVertexArray::VertexDataType::VERTEX_FLOAT_TYPE,
TriangleVertexArray::IndexDataType::INDEX_INTEGER_TYPE);
// Create the TriangleMesh
std::vector<rp3d::Message> messages;
TriangleMesh* triangleMesh = physicsCommon.createTriangleMesh(vertexArray, messages);
// Display the messages (info, warning and errors)
if (messages.size() > 0) {
for (const rp3d::Message& message: messages) {
std::string messageType;
switch(message.type) {
case rp3d::Message::Type::Information:
messageType = "info";
break;
case rp3d::Message::Type::Warning:
messageType = "warning";
break;
case rp3d::Message::Type::Error:
messageType = "error";
break;
}
std::cout << "Message (" << messageType << "): " << message.text << std::endl;
}
}
// Make sure there was no errors during mesh creation
assert(triangleMesh != nullptr);
The vertices and faces data are copied into the TriangleMesh. Therefore, after the
TriangleMesh creation, you can release your TriangleVertexArray but you need to keep
the TriangleMesh until all the ConcaveMeshShapes that have been instantiated from it are
destroyed.
In the previous example, the vertices normals that are needed for collision detection are
automatically computed. However, you can specify your own vertices normals by using
another constructor for the TriangleVertexArray. Note that each vertex normal is
computed as weighted average of the face normals of all the neighboring triangle faces.
Therefore, if you specify your mesh with duplicated vertices when you create the
TriangleVertexArray, the automatic vertices normals computation will not give correct
normals because each vertex of the mesh will only be part of a single triangle face. In this
case, you must provide your own vertices normals when you create the TriangleVertexArray.
The PhysicsCommon::createTriangleMesh() will also report errors if some faces of
your mesh have almost zero area (degenerated face). You will need to fix those errors in
order to create the TriangleMesh. It is also a good idea to avoid coplanar faces for better
collision detection.
Now that we have a TriangleMesh, we can create the actual ConcaveMeshShape.
const Vector3 scaling(1, 1, 1);
// Create the ConcaveMeshShape using the TriangleMesh
ConcaveMeshShape* concaveMeshShape = physicsCommon.createConcaveMeshShape(triangleMesh, scaling);
As you can see, you can specify a scaling factor in the PhysicsCommon::createConcaveMeshShape()
method when you create a ConcaveMeshShape. All the vertices of your mesh will be scaled
from the local origin of the mesh by this factor. Note that you can use the same
TriangleMesh instance for creating multiple ConcaveMeshShape with a different scaling
factor each time.
10.1.6 Heightfield Shape
The HeightFieldShape is a collision shape that can be used to represent a static terrain
for instance. This shape is a two dimensional grid that has a given height value at each point
of the grid.
First, we need to create an HeightField. To do that, we need to have an array with all
the height values of our field. We can have height values of type integer, float or double. We
need to specify the number of rows and columns of our two dimensional grid. Note
that the height values in our array must be organized such that the value at row
indexRow and column indexColumn is located at the following position in the array:
Here is an example that shows how to create a HeightField:
const int nbColumns = 50;
float minHeight = 100;
float maxHeight = 500;
// Height values
float heightValues[nbRows * nbColumns] = ...;
std::vector<rp3d::Message> messages;
HeightField* heightField = physicsCommon.createHeightField(NB_POINTS_WIDTH, NB_POINTS_LENGTH,
heightValues, rp3d::HeightField::HeightDataType::HEIGHT_FLOAT_TYPE,
messages);
// Display the messages (info, warning and errors)
if (messages.size() > 0) {
for (const rp3d::Message& message: messages) {
std::string messageType;
switch(message.type) {
case rp3d::Message::Type::Information:
messageType = "info";
break;
case rp3d::Message::Type::Warning:
messageType = "warning";
break;
case rp3d::Message::Type::Error:
messageType = "error";
break;
}
std::cout << "Message (" << messageType << "): " << message.text << std::endl;
}
}
// Make sure there was no errors during the height field creation
assert(heightField != nullptr);
The height values are copied into the HeightField instance. Therefore, after the
HeightField creation, you can release the memory of your array of height values but you
need to keep the TriangleMesh until all the HeightFieldShapes that have been
instantiated from it are destroyed.
Once we have our HeightField instance, we can use it to create an actual
HeightFieldShape as in the following example:
You can also specify a scaling factor in the PhysicsCommon::createHeightShape()
method when you create a HeightFieldShape. All the vertices of your mesh will be scaled
from the local origin of the shape by this factor.
When creating a HeightFieldShape, the origin of the shape will be at the center of its bounding volume. Therefore, if you create a HeightFieldShape with a minimum height of 100 and a maximum height of 500, the maximum coordinates of the shape on the Y axis will be 200 and the minimum coordinates will be -200.
10.2 Collision filtering
By default all the colliders of the bodies are able to collide with each other in the world.
However, sometimes we want a body to collide only with a given group of bodies and not
with other bodies. This is called collision filtering. The idea is to group the colliders of bodies
into categories. Then we can specify for each collider against which categories of colliders it
will be able to collide.
ReactPhysics3D uses bits masks to represent categories. The first thing to do is to
assign a category to the colliders of your body. To do this, you need to call the
Collider::setCollisionCategoryBits() method on the corresponding collider as in the
following example. Here we consider that we have four bodies where each one has a single
collider.
enum Category {
CATEGORY1 = 0x0001,
CATEGORY2 = 0x0002,
CATEGORY3 = 0x0004
};
// Set the collision category for each collider of
// each of the four bodies
colliderBody1->setCollisionCategoryBits(CATEGORY1);
colliderBody2->setCollisionCategoryBits(CATEGORY2);
colliderBody3->setCollisionCategoryBits(CATEGORY3);
colliderBody4->setCollisionCategoryBits(CATEGORY3);
As you can see, the collider of body 1 will be part of the category 1, the collider of body 2
will be part of the category 2 and the colliders of bodies 3 and 4 will be part of the category
3.
Now, for each collider, we need to specify with which categories it is allowed to collide
with. To do this, you need to use the Collider::setCollideWithMaskBits() method.
Note that you can specify one or more categories using the bitwise OR operator. The
following example shows how to specify with which categories the collider can collide.
// is allowed to collide
colliderBody1->setCollideWithMaskBits(CATEGORY3);
colliderBody2->setCollideWithMaskBits(CATEGORY1 | CATEGORY3);
colliderBody3->setCollideWithMaskBits(CATEGORY2);
colliderBody4->setCollideWithMaskBits(CATEGORY2);
As you can see, we specify that the body 1 will be allowed to collide with bodies from the
categorie 3. We also indicate that the body 2 will be allowed to collide with bodies
from the category 1 and 3 (using the bitwise OR operator). Finally, we specify
that bodies 3 and 4 will be allowed to collide against bodies of the category 2.
A collider is able to collide with another only if you have specify that the category mask of
the first collider is part of the collide with mask of the second collider. It is also important to
understand that this condition must be satisfied in both directions. For instance
in the previous example, the body 1 (of category 1) says that it wants to collide
against bodies of the category 3 (for instance against body 3). However, body 1 and
body 3 will not be able to collide because the body 3 does not say that it wants to
collide with bodies from category 1. Therefore, in the previous example, the body
2 is allowed to collide against bodies 3 and 4 but no other collision is allowed.
In the same way, you can perform this filtering for ray casting (described in section 12). For instance, you can perform a ray cast test against a given subset of categories of colliders only.
10.3 Material
The material of a collider is used to describe the physical properties it is made of. This is
represented by the Material class. Each collider that you create will have a default
material. You can get the material of the collider using the Collider::getMaterial()
method.
You can use the material to set those physical properties.
For instance, you can change the bounciness of the collider. The bounciness is a value
between 0 and 1. The value 1 is used for a very bouncy object and the value 0 means that
the collider will not be bouncy at all. To change the bounciness of the material, you can use
the Material::setBounciness() method.
It is also possible to set the mass density of the collider which has a default value of 1.
As described in section 9.8, the mass density of a collider can be used to automatically
compute the mass, center of mass and inertia tensor of a rigid body. In order to change the
mass density of a collider, you need to use the Material::setMassDensity() method.
You are also able to change the friction coefficient of the collider. This value needs to be
between 0 and 1. If the value is 0, no friction will be applied when the collider is in
contact with another collider. However, if the value is 1, the friction force will be
high. You can change the friction coefficient of the material with the Material::
setFrictionCoefficient() method.
Here is how to get the material of a collider and how to modify some of its properties:
Material& material = collider->getMaterial();
// Change the bounciness of the collider
material.setBounciness(0.4);
// Change the friction coefficient of the collider
material.setFrictionCoefficient(0.2);
A collider can have different behaviors. It can be a simulation collider, a world query
collider or a trigger. It can have also have two behaviors (except simulation collider and
trigger at the same time). By default, when you create a collider, it will be a simulation
collider and a world query collider but not a trigger. We will now take a look at those
behaviors.
10.4 Simulation Collider
A simulation collider is a collider that will be able to collide against other simulation colliders
in the world. It means that when two simulation colliders collide, contacts will be created and
used to compute the forces/torques needed to make their bodies to bump into each other.
For instance, if you want to simulate a body that is falling on the floor and bumping against it,
you will need to have a least of simulation collider in both the falling body and the floor body.
To set a collider as being a simulation collider, you need to use the Collider::
setIsSimulationCollider() method as in the following example:
When you create a collider, it is a simulation collider by default.
10.5 World Query Collider
A world query collider is a collider used to perform world queries on it. World queries are manual queries perform on the physics world like raycasting or testing if two collider collide or overlap using the following method for instance:
-
testOverlap()
-
Those methods can be used to test whether the colliders of two bodies overlap or not.
-
testCollision()
-
Those methods will give you the collision information (contact points, normals, ...) between two colliding bodies.
-
testPointInside()
-
This method will tell you if a 3D point is inside a RigidBody or Collider.
-
raycast()
-
Those methods will try to find intersection between a ray and colliders of the world.
For instance, if you want to test a body of your scene with raycasting, you need to set the collider of that body as being a world query collider.
To set a collider as being a world query collider, you need to use the Collider::
setIsWorldQueryCollider() method as in the following example:
A collider can be a world query collider and a simulation collider at the same time. When you create a collider, it is a world query collider by default.
10.6 Trigger
A trigger, is a collider that cannot collide with any other colliders but can only report when it
is overlapping with another collider. For instance, consider a game where a player moves
around and has to avoid touching some bombs. The player has a rigid body with a capsule
collider for instance and the bombs are rigid bodies where each one has a sphere collider.
Now, you do not want the player to bump against the bombs but you only want to know when
the collider of the player overlaps with the collider of a bomb. In this case, you can set
bombs colliders as being triggers. In this case, no rigid bodies in the world will be
able to collide against the bombs colliders but you can receive notifications when
a collider (the player body collider for instance) overlaps with a bomb collider.
Therefore, you can use this to know when the player touches a bomb of the world.
To set a collider as being a trigger, you need to use the Collider::setIsTrigger()
method as in the following example:
Note that a collider cannot be a trigger and a simulation collider at the same time. When you create a collide it is not a trigger by default.
The section 14.2 describes how to use the EventListener class to receive notifications when colliders overlap with some triggers.
11 Joints
Joints are used to constrain the motion of the rigid bodies between each other. A single joint
represents a constraint between two rigid bodies. When the motion of the first
body of the joint is known, the relative motion of the second body has at most six
degrees of freedom (three for the translation and three for the rotation). The different
joints can reduce the number of degrees of freedom between two rigid bodies.
Some joints have limits to control the range of motion and some joints have motors to
automatically move the bodies of the joint at a given speed.
11.1 Ball and Socket Joint
The BallAndSocketJoint class describes a ball and socket joint between two bodies. In a
ball and socket joint, the two bodies cannot translate with respect to each other.
However, they can rotate freely around a common anchor point. This joint has three
degrees of freedom and can be used to simulate a chain of bodies for instance.
In order to create a ball and socket joint, you first need to create an instance of the
BallAndSocketJointInfo class with the necessary information. You need to provide the
pointers to the two rigid bodies and also the coordinates of the anchor point. The
BallAndSocketJointInfo class contains different constructors that you can use whether
you want to specify the anchor point in world-space or local-space coordinates. The joint will
make sure that the two local-space anchor points match in world-space. Make sure that the
two bodies are in a valid position (with respect to the joint constraint) at the beginning of the
simulation.
Here is the code to create the BallAndSocketJointInfo object:
const Vector3 anchorPoint(2.0, 4.0, 0.0);
// Create the joint info object
BallAndSocketJointInfo jointInfo(body1, body2, anchorPoint);
Now, it is time to create the actual joint in the physics world using the
PhysicsWorld::createJoint() method. Note that this method will also return a pointer to
the BallAndSocketJoint object that has been created internally. You will then be able to
use that pointer to change properties of the joint and also to destroy it at the end.
Here is how to create the joint in the world:
BallAndSocketJoint* joint;
joint = dynamic_cast<BallAndSocketJoint*>(world->createJoint(jointInfo));
11.1.1 Cone limit
With the ball and socket joint, it is possible to enable a cone limit. Let’s call the anchor axis
for body 1 the axis from body 1 center of mass to the joint anchor point. The cone limit can
be used to constraint the angle between the anchor axis of body 1 and the anchor
axis of body 2. The idea is to limit the angle of the anchor axis of body 2 inside
a cone around the anchor axis of body 1. The cone is defined by its main axis
which is the anchor axis of body 1 and is also defined by the cone half angle.
In the following example, we enable the cone limit for a given ball and socket joint.
joint->setConeLimitHalfAngle(45.0 * PI / 180.0);
// Enable the cone limit for this joint
joint->enableConeLimit(true);
11.2 Hinge Joint
The HingeJoint class describes a hinge joint (or revolute joint) between two rigid bodies.
The hinge joint only allows rotation around an anchor point and around a single axis (the
hinge axis). This joint can be used to simulate doors or pendulums for instance.
In order to create a hinge joint, you first need to create a HingeJointInfo object with
the necessary information. You need to provide the pointers to the two rigid bodies, the
coordinates of the anchor point and also the hinge rotation axis. The HingeJointInfo class
contains different constructors that you can use whether you want to specify the anchor
point or the rotation axis in local-space or world-space. Make sure that the two bodies are in
a valid position (with respect to the joint constraint) at the beginning of the simulation.
Here is the code to create the HingeJointInfo object:
const Vector3 anchorPoint(2.0, 4.0, 0.0);
// Hinge rotation axis in world-space
const Vector3 axis(0.0, 0.0, 1.0);
// Create the joint info object
HingeJointInfo jointInfo(body1, body2, anchorPoint, axis);
Now, it is time to create the actual joint in the physics world using the
PhysicsWorld::createJoint() method. Note that this method will also return a pointer to
the HingeJoint object that has been created internally. You will then be able to use
that pointer to change properties of the joint and also to destroy it at the end.
Here is how to create the joint in the world:
HingeJoint* joint;
joint = dynamic_cast<HingeJoint*>(world->createJoint(jointInfo));
11.2.1 Limits
With the hinge joint, you can constrain the motion range using limits. The limits of the hinge
joint are the minimum and maximum angle of rotation allowed with respect to the initial
angle between the bodies when the joint is created. The limits are disabled by default. If you
want to use the limits, you first need to enable them by setting the isLimitEnabled variable
of the HingeJointInfo object to true before you create the joint. You also have to specify
the minimum and maximum limit angles (in radians) using the minAngleLimit and
maxAngleLimit variables of the joint info object. Note that the minimum limit angle must be
in the range [-2π; 0] and the maximum limit angle must be in the range [0; 2π].
For instance, here is the way to use the limits for a hinge joint when the joint is created:
HingeJointInfo jointInfo(body1, body2, anchorPoint, axis);
// Enable the limits of the joint
jointInfo.isLimitEnabled = true;
// Minimum limit angle
jointInfo.minAngleLimit = -PI / 2.0;
// Maximum limit angle
jointInfo.maxAngleLimit = PI / 2.0;
// Create the hinge joint in the physis world
HingeJoint* joint;
joint = dynamic_cast<HingeJoint*>(world->createJoint(jointInfo));
It is also possible to use the HingeJoint::enableLimit(), HingeJoint::setMinAngleLimit() and HingeJoint::setMaxAngleLimit() methods to specify the limits of the joint after its creation. See the API documentation for more information.
11.2.2 Motor
A motor is also available for the hinge joint. It can be used to rotate the bodies around the
hinge axis at a given angular speed and such that the torque applied to rotate the bodies
does not exceed a maximum allowed torque. The motor is disabled by default. If you want to
use it, you first have to activate it using the isMotorEnabled boolean variable of the
HingeJointInfo object before you create the joint. Then, you need to specify the angular
motor speed (in radians/seconds) using the motorSpeed variable and also the
maximum allowed torque (in Newton ⋅ meters) with the maxMotorTorque variable.
For instance, here is how to enable the motor of the hinge joint when the joint is created:
HingeJointInfo jointInfo(body1, body2, anchorPoint, axis);
// Enable the motor of the joint
jointInfo.isMotorEnabled = true;
// Motor angular speed
jointInfo.motorSpeed = PI / 4.0;
// Maximum allowed torque
jointInfo.maxMotorTorque = 10.0;
// Create the hinge joint in the physics world
HingeJoint* joint;
joint = dynamic_cast<HingeJoint*>(world->createJoint(jointInfo));
It is also possible to use the HingeJoint::enableMotor(), HingeJoint::setMotorSpeed() and HingeJoint::setMaxMotorTorque() methods to enable the motor of the joint after its creation. See the API documentation for more information.
11.3 Slider Joint
The SliderJoint class describes a slider joint (or prismatic joint) that only allows relative
translation along a single direction. It has a single degree of freedom and allows no relative
rotation.
In order to create a slider joint, you first need to specify the anchor point and the slider
axis direction. The constructor of the SliderJointInfo object needs two pointers to the
bodies of the joint, the anchor point and the axis direction. The SliderJointInfo class
contains different constructors that you can use whether you want to specify the anchor
point and the direction axis in local-space or world-space. Make sure that the two bodies
are in a valid position (with respect to the joint constraint) at the beginning of the
simulation.
You can see in the following code how to specify the information to create a slider joint:
const Vector3 anchorPoint = 0.5 * (body2Position + body1Position);
// Slider axis in world-space
const Vector3 axis = (body2Position - body1Position);
// Create the joint info object
SliderJointInfo jointInfo(body1, body2, anchorPoint, axis);
Now, it is possible to create the actual joint in the physics world using the
PhysicsWorld::createJoint() method. Note that this method will also return a pointer to
the SliderJoint object that has been created internally. You will then be able to use
that pointer to change properties of the joint and also to destroy it at the end.
Here is how to create the joint in the world:
SliderJoint* joint;
joint = dynamic_cast<SliderJoint*>(world->createJoint(jointInfo));
11.3.1 Limits
It is also possible to control the range of the slider joint motion using limits. The limits are
disabled by default. In order to use the limits when the joint is created, you first need to
activate them using the isLimitEnabled variable of the SliderJointInfo class. Then, you
need to specify the minimum and maximum translation limits (in meters) using the
minTranslationLimit and maxTranslationLimit variables. Note that the initial position of
the two bodies when the joint is created corresponds to a translation of zero. Therefore, the
minimum limit must be smaller or equal to zero and the maximum limit must be larger or
equal to zero.
You can see in the following example how to set the limits when the slider joint is
created:
SliderJointInfo jointInfo(body1, body2, anchorPoint, axis);
// Enable the limits of the joint
jointInfo.isLimitEnabled = true;
// Minimum translation limit
jointInfo.minTranslationLimit = -1.7;
// Maximum translation limit
jointInfo.maxTranslationLimit = 1.7;
// Create the hinge joint in the physics world
SliderJoint* joint;
joint = dynamic_cast<SliderJoint*>(world->createJoint(jointInfo));
You can also use the SliderJoint::enableLimit(), SliderJoint::setMinTranslationLimit() and SliderJoint::setMaxTranslationLimit() methods to enable the limits of the joint after its creation. See the API documentation for more information.
11.3.2 Motor
The slider joint also has a motor. You can use it to translate the bodies along the slider axis
at a given linear speed and such that the force applied to move the bodies does not exceed
a maximum allowed force. The motor is disabled by default. If you want to use it when the
joint is created, you first have to activate it using the isMotorEnabled boolean variable of
the SliderJointInfo object before you create the joint. Then, you need to specify
the linear motor speed (in meters/seconds) using the motorSpeed variable and
also the maximum allowed force (in Newtons) with the maxMotorForce variable.
For instance, here is how to enable the motor of the slider joint when the joint is created:
SliderJointInfo jointInfo(body1, body2, anchorPoint, axis);
// Enable the motor of the joint
jointInfo.isMotorEnabled = true;
// Motor linear speed
jointInfo.motorSpeed = 2.0;
// Maximum allowed force
jointInfo.maxMotorForce = 10.0;
// Create the slider joint in the physics world
SliderJoint* joint;
joint = dynamic_cast<SliderJoint*>(world->createJoint(jointInfo));
It is also possible to use the SliderJoint::enableMotor(), SliderJoint::setMotorSpeed() and SliderJoint::setMaxMotorForce() methods to enable the motor of the joint after its creation. See the API documentation for more information.
11.4 Fixed Joint
The FixedJoint class describes a fixed joint between two bodies. In a fixed joint, there is
no degree of freedom, the bodies are not allowed to translate or rotate with respect to each
other.
In order to create a fixed joint, you simply need to specify an anchor point to create the
FixedJointInfo object. The FixedJointInfo class contains different constructors that you
can use whether you want to specify the anchor point in local-space or world-space. Make
sure that the two bodies are in a valid position (with respect to the joint constraint) at the
beginning of the simulation.
For instance, here is how to create the joint info object for a fixed joint:
Vector3 anchorPoint(2.0, 3.0, 4.0);
// Create the joint info object
FixedJointInfo jointInfo1(body1, body2, anchorPoint);
Now, it is possible to create the actual joint in the physics world using the
PhysicsWorld::createJoint() method. Note that this method will also return a pointer to
the FixedJoint object that has been created internally. You will then be able to use
that pointer to change properties of the joint and also to destroy it at the end.
Here is how to create the joint in the world:
FixedJoint* joint;
joint = dynamic_cast<FixedJoint*>(world->createJoint(jointInfo));
11.5 Collision between the bodies of a Joint
By default, the two bodies involved in a joint are able to collide with each other. However, it is
possible to disable the collision between the two bodies that are part of the joint. To do it,
you simply need to set the variable isCollisionEnabled of the joint info object to false
when you create the joint.
For instance, when you create a HingeJointInfo object in order to construct a hinge
joint, you can disable the collision between the two bodies of the joint as in the following
example:
HingeJointInfo jointInfo(body1, body2, anchorPoint, axis);
// Disable the collision between the bodies
jointInfo.isCollisionEnabled = false;
// Create the joint in the physics world
HingeJoint* joint;
joint = dynamic_cast<HingeJoint*>(world->createJoint(jointInfo));
11.6 Destroying a Joint
In order to destroy a joint, you simply need to call the PhysicsWorld::destroyJoint()
method using the pointer to a previously created joint object as argument as shown in the
following code:
// Destroy the joint
world->destroyJoint(joint);
It is important that you destroy all the joints that you have created at the end of the simulation. Also note that destroying a rigid body involved in a joint will automatically destroy that joint.
12 Ray casting
You can use ReactPhysics3D to test intersection between a ray and the bodies of the world
you have created. Ray casting can be performed against multiple bodies, a single body or
any collider of a given body. Note that ray casting only works from the outside of the
bodies. If the origin of a ray is inside a collision shape, no hit will be reported.
The first thing you need to do is to create a ray using the Ray class of ReactPhysics3D.
As you can see in the following example, this is very easy. You simply need to specify the
point where the ray starts and the point where the ray ends (in world-space coordinates).
Vector3 startPoint(0.0, 5.0, 1.0);
Vector3 endPoint(0.0, 5.0, 30);
// Create the ray
Ray ray(startPoint, endPoint);
Any ray casting test that will be described in the following sections returns a
RaycastInfo object in case of intersection with the ray. This structure contains the following
attributes:
-
worldPoint
-
Hit point in world-space coordinates
-
worldNormal
-
Surface normal of the collider at the hit point in world-space coordinates
-
hitFraction
-
Fraction distance of the hit point between startPoint and endPoint of the ray. The hit point p is such that p = startPoint+hitFraction⋅(endPoint-startPoint)
-
body
-
Pointer to the rigid body that has been hit by the ray
-
collider
-
Pointer to the collider that has been hit by the ray
Note that you can also use collision filtering with ray casting in order to only test ray intersection with specific colliders. Collision filtering is described in section 10.2.
12.1 Ray casting against multiple bodies
This section describes how to get all the colliders of all bodies in the world that are intersected by a given ray.
12.1.1 The RaycastCallback class
First, you have to implement your own class that inherits from the RaycastCallback class.
Then, you need to override the RaycastCallback::notifyRaycastHit() method in your
own class. An instance of your class have to be provided as a parameter of the raycast
method and the notifyRaycastHit() method will be called for each collider that is hit by
the ray. You will receive, as a parameter of this method, a RaycastInfo object that will
contain the information about the raycast hit (hit point, hit surface normal, hit body, hit
collider, …).
In your notifyRaycastHit() method, you need to return a fraction value that will
specify the continuation of the ray cast after a hit. The return value is the next maxFraction
value to use. If you return a fraction of 0.0, it means that the raycast should terminate. If you
return a fraction of 1.0, it indicates that the ray is not clipped and the ray cast should
continue as if no hit occurred. If you return the fraction in the parameter (hitFraction value in
the RaycastInfo object), the current ray will be clipped to this fraction in the next queries. If
you return -1.0, it will ignore this collider and continue the ray cast. Note that no assumption
can be done about the order of the calls of the notifyRaycastHit() method.
Here is an example about creating your own raycast callback class that inherits from the
RaycastCallback class and how to override the notifyRaycastHit() method:
class MyCallbackClass : public RaycastCallback {
public:
virtual decimal notifyRaycastHit(const RaycastInfo& info) {
// Display the world hit point coordinates
std::cout << "Hit point : " <<
info.worldPoint.x <<
info.worldPoint.y <<
info.worldPoint.z <<
std::endl;
// Return a fraction of 1.0 to gather all hits
return decimal(1.0);
}
};
12.1.2 Raycast query in the world
Now that you have your own raycast callback class, you can use the PhysicsWorld::raycast()
method to perform a ray casting test on a physics world.
The first parameter of this method is a reference to the Ray object representing the ray you
need to test intersection with. The second parameter is a pointer to the object of your
raycast callback object. You can specify an optional third parameter which is the bit mask for
collision filtering. It can be used to raycast only against selected categories of colliders as
described in section 10.2.
Vector3 startPoint(1 , 2, 10);
Vector3 endPoint(1, 2, -20);
Ray ray(startPoint, endPoint);
// Create an instance of your callback class
MyCallbackClass callbackObject;
// Raycast test
world->raycast(ray, &callbackObject);
12.2 Ray casting against a single body
You can also perform ray casting against a single specific rigid body of the world. To do this,
you need to use the RigidBody::raycast() method. This method takes two parameters.
The first one is a reference to the Ray object and the second one is a reference to the
RaycastInfo object that will contain hit information if the ray hits the body. This method
returns true if the ray hits the body. The RaycastInfo object will only be valid if the returned
value is true (a hit occured).
The following example shows how test ray intersection with a body:
Vector3 startPoint(1 , 2, 10);
Vector3 endPoint(1, 2, -20);
Ray ray(startPoint, endPoint);
// Create the raycast info object for the
// raycast result
RaycastInfo raycastInfo;
// Raycast test
bool isHit = body->raycast(ray, raycastInfo);
12.3 Ray casting against the collider of a body
You can also perform ray casting against a single specific collider of a rigid body of the
world. To do this, you need to use the Collider::raycast() method of the given collider.
This method takes two parameters. The first one is a reference to the Ray object
and the second one is a reference to the RaycastInfo object that will contain hit
information if the ray hits the body. This method returns true if the ray hits the body. The
RaycastInfo object will only be valid if the returned value is true (a hit occured).
The following example shows how to test ray intersection with a given collider:
Vector3 startPoint(1 , 2, 10);
Vector3 endPoint(1, 2, -20);
Ray ray(startPoint, endPoint);
// Create the raycast info object for the
// raycast result
RaycastInfo raycastInfo;
// Test raycasting against a collider
bool isHit = collider->raycast(ray, raycastInfo);
13 Testbed application
The testbed application contains a graphical interface where you can select and see
several demo scenes using the ReactPhysics3D library.
As described in section 4, you can enable a CMake option to build the testbed
application when you build the library. Note that OpenGL is required to compile it.
The testbed application can be found in the testbed/ folder of the ReactPhysics3D
library. Do not hesitate to take a look at the code of the demo scenes to better understand
how to use the library in your application.
14 Receiving Feedback
Sometimes, you want to receive notifications from the physics engine when a given event
occurs. The EventListener class can be used for that purpose. In order to use it,
you need to create a new class that inherits from the EventListener class and
overrides some methods that will be called by the ReactPhysics3D library when some
events occur. You also need to register your class in the physics world using the
PhysicsWorld::setEventListener() as in the following code:
class YourEventListener : public EventListener {
...
};
YourEventListener listener;
// Register your event listener class
world->setEventListener(&listener);
14.1 Contacts
The EventListener contains a onContact() method. If you override this method
in your custom event listener class, this method will be called when you call the
PhysicsWorld::update() method if there are contacts to report during the current update.
The onContact() method will be called with a CollisionCallback::CallbackData object
in parameter. This object has a getNbContactPairs() and a getContactPair() methods
that will allow you to get each contact pair (class CollisionCallback::ContactPair) that
occured during the physics world update. Note that a contact pair contains a list of
contact points between two bodies. Once you get a contact pair, you can use the
getBody1() or getBody2() methods to get the bodies in contact, you can use the
getCollider1() or getCollider2() methods to get the colliders in contact and the
getNbContactPoints() and getContactPoint() methods to get the contact points (class
CollisionCallback::ContactPoint) of the contact pair. Note that the onContact()
method will report contacts after the collision detection phase and before the contact
resolution.
The contact pair also has a getEventType() method that gives information about the type
of contact event for the pair. It can be ContactStart if the two bodies of the contact pair
where not colliding in the previous call to PhysicsWorld::update() and are now colliding.
It can be ContactStay, if the two bodies where colliding in the previous frame and are still
colliding or it can be ContactExit if the two bodies where colliding in the previous frame but
are not colliding anymore. Note that in this last situation, there will be no contact points in
the contact pair.
As you know, rigid bodies can sleep. During that time, no contacts will be reported using the
EventListener::onContact() method. Therefore, If you stop receiving contact
notifications for a rigid body, it does not necessarily mean that there is no contacts anymore
but it could mean that the body has fallen asleep. You need to use the getEventType()
method to know if the body is not colliding anymore (when you receive an event of type
ContactExit).
In the following example, you can see how to override the EventListener::onContact()
method to get the current contact points of the physics world:
class YourEventListener : public EventListener {
// Override the onContact() method
virtual void onContact(const CollisionCallback::CallbackData& callbackData) overrride {
// For each contact pair
for (uint p = 0; p < callbackData.getNbContactPairs(); p++) {
// Get the contact pair
CollisionCallback::ContactPair contactPair = callbackData.getContactPair(p);
// For each contact point of the contact pair
for (uint c = 0; c < contactPair.getNbContactPoints(); c++) {
// Get the contact point
CollisionCallback::ContactPoint contactPoint = contactPair.getContactPoint(c);
// Get the contact point on the first collider and convert it in world-space
Vector3 worldPoint = contactPair.getCollider1()->getLocalToWorldTransform() * contactPoint.getLocalPointOnCollider1();
...
}
}
}
};
14.2 Triggers
As described in section 10.6 it is possible to set a collider as being a trigger. You can do this
if you do not want any collision with this collider but you are only interested in knowing when
another collider enters or exit the volume of the collider. If you do this, you will need to
override the onTrigger() method of the EventListener. This method will be called and
report all the collision with your triggers when you call the PhysicsWorld::update()
method.
The onTrigger() method will be called with an OverlapCallback::CallbackData
object in parameter. This object has a getNbOverlappingPairs() and a
getOverlappingPair() methods that will allow you to get each overlapping pair (class
OverlapCallback::OverlapPair) that occured during the physics world update. Once you
get an overlapping pair, you can use the getBody1() or getBody2() methods to get
the bodies in contact and the getCollider1() or getCollider2() methods to
get the trigger colliders in contact. Note that the onTrigger() method will report
overlaping triggers after the collision detection phase and before the contact resolution.
The overlapping pair also has a getEventType() method that gives information about
the type of overlapping event for the pair. It can be OverlapStart if the two bodies of the
pair where not overlapping in the previous call to PhysicsWorld::update() and are
now overlapping. It can be OverlapStay, if the two bodies where overlapping in
the previous frame and are still overlapping or it can be OverlapExit if the two
bodies where overlapping in the previous frame but are not overlapping anymore.
As you know, rigid bodies can sleep. During that time, no overlap will be reported using
the EventListener::onTrigger() method. Therefore, If you stop receiving trigger overlap
notifications for a rigid body, it does not necessarily mean that there is no overlap anymore
but it could mean that the body has fallen asleep. You need to use the getEventType()
method to know if the body is not overlapping anymore (when you receive an event of type
OverlapExit).
Note that the onTrigger() method is only called for colliders that you have set as triggers using the Collider::setIsTrigger() method.
15 Profiler
If you build the library with the RP3D_PROFILING_ENABLED variable enabled (see section
4.4), a real-time profiler will collect information while the application is running. Then, at the
end of your application, when the destructor of the PhysicsWorld class is called,
information about the running time of the library will written to a file. This can be useful to
know where time is spent in the different parts of the ReactPhysics3D library in case your
application is too slow.
Each physics world has its own profiler. By default, the profiling report wil be written in a
text file next to the executable. If you have multiple worlds in your application, there will be
one profile file for each world. The profile files will be named after the name of the worlds.
By defaults worlds will have names: world, world1, world2, world3, …You can change the
name of the world by setting it into the WorldSettings object when you create the world
(see section 8).
16 Logger
ReactPhysics3D has an internal logger that can be used to get logs from the library
while the application is running. This can be useful for debugging for instance.
The logger is part of the PhysicsCommon class. By default there is no logger set.
If you want to create your custom logger to receive logs from ReactPhysics3D,
you can inherit the Logger class and override the Logger::log() method. Then,
you have to use the PhysicsCommon::setLogger() method to set the logger.
Getting the logs is the way for you to see the errors reported by the library and therefore,
you should not just ignore the errors from the logs. You should at least redirect the logs
(warnings and errors) in the standard output while debugging your application as described
in the example below.
If you don’t want to create your custom logger class, you can use the default
logger of ReactPhysics3D (class DefaultLogger). With this logger, you can output
the logs into a file or a std::stream. The logs can have different format like raw
text of HTML. In order to instantiate the default logger, you need to call the
PhysicsCommon::createDefaultLogger() method. Then, you can customize this logger
and finally, you need to set this logger using the PhysicsCommon::setLogger() method.
The following code shows how to create a default logger that will output logs
(warning and errors) in HTML into a file and in raw text into the standard output:
DefaultLogger* logger = physicsCommon.createDefaultLogger();
// Log level (warnings and errors)
uint logLevel = static_cast<uint>(static_cast<uint>(Logger::Level::Warning) | static_cast<uint>(Logger::Level::Error);
// Output the logs into an HTML file
logger->addFileDestination("rp3d_log_" + name + ".html", logLevel, DefaultLogger::Format::HTML);
// Output the logs into the standard output
logger->addStreamDestination(std::cout, logLevel, DefaultLogger::Format::Text);
// Set the logger
physicsCommon.setLogger(logger);
17 Debug Renderer
For debugging purpose, it can be useful to display the physics objects of ReactPhysics3D
on top of your simulation. This is possible using the DebugRenderer class of the
library that allows you to display the colliders shapes, the AABB of the colliders
or the contact points for instance. This can help you to check for instance if the
physics collider of ReactPhysics3D is correctly aligned with the object you are
rendering. When debug rendering is enabled, ReactPhysics3D will generate each time
you call the PhysicsWorld::update() method (each frame), some rendering
primitives (lines and triangles) that you will be able to retrieve and display on you
simulation (with OpenGL or DirectX for instance). Note that ReactPhysics3D will only
generate the arrays of lines and triangles but you are responsible to draw them.
By default, the debug rendering is disabled. You can activate it using the
PhysicsWorld::setIsDebugRenderingEnabled() method. Note that you should
disable it for the final release because this can be quite expensive to compute.
You can get a reference to DebugRenderer of the physics world using the
PhysicsWorld::getDebugRenderer() method. You also need to enable debugging for
each body that you want to debug using the Body::setIsDebugEnabled() method. By
default, debuging is disabled for all bodies. Then, you need to select the debug items (class
DebugRenderer:DebugItem) you want to display. For instance, you might want to display
the shapes of the colliders (DebugItem::COLLISION_SHAPE), the broad-phase AABBs of
the colliders (DebugItem::COLLIDER_BROADPHASE_AABB), the colliders AABBs
(DebugItem::COLLIDER_AABB), the contact points (DebugItem::CONTACT_POINT) or
the contact normals (DebugItem::CONTACT_NORMAL). You need to use the
DebugRenderer::setIsDebugItemDisplayed() method to select if you want or not a given
debug item to be displayed.
The following code shows how to enable debug rendering in order to display contact
points and contact normals:
physicsWorld->setIsDebugRenderingEnabled(true);
// Enable debugging for each rigid body that we want to display
for (RigidBody* body: rigidBodies) {
body->setIsDebugEnabled(true);
}
// Get a reference to the debug renderer
DebugRenderer& debugRenderer = physicsWorld->getDebugRenderer();
// Select the contact points and contact normals to be displayed
debugRenderer.setIsDebugItemDisplayed(DebugRenderer::DebugItem::CONTACT_POINT, true);
debugRenderer.setIsDebugItemDisplayed(DebugRenderer::DebugItem::CONTACT_NORMAL, true);
Now each time you call the PhysicsWorld::update() method, ReactPhysics3D will generate arrays with lines and triangles so that you can draw them in your application. You can use the DebugRenderer::getNbLines() and DebugRenderer::getNbTriangles() methods to know the number of lines and triangles to draw. Then, you need to call the DebugRenderer::getLinesArray() and DebugRenderer::getTrianglesArray() methods to get pointers to the beginning of the lines and triangles arrays. The lines array contain elements of type DebugRenderer:DebugLine with the two points of a line and their colors and the triangles array has elements of type DebugRenderer:DebugTriangle with the three points of each triangle and their colors. Note that the vertices of the lines and triangles are defined in world-space coordinates of the physics world.
18 Determinism
Sometimes, it is important that the simulation of a physics world behaves exactly the same each time we run it. Because of the differences in compilers and computer hardware it is quite difficult to achieve this between different machines. However, ReactPhysics3D should be deterministic when compiled with the same compiler and running on the same machine. In order to obtain two similar runs of the simulation of a physics world, it is adviced to completely destroy and recreate the physics world, the bodies and the joints inside it (in order to reset all the internal data cached for the simulation). You must also create the bodies and joints in the same order each time and make sure that all the calls to the methods of your physics world, bodies and joints happen in the same order.
19 API Reference Documentation
ReactPhysics3D contains Doxygen documentation for its API.
The API reference documentation is also available online here:
http://www.reactphysics3d.com/documentation/api/html/
You can also find it in the library archive in the folder /documentation/API/html/. You just need to open the index.html file with your favorite web browser.
20 Issues
If you find some bugs, do not hesitate to report them on our issue tracker here:
https://github.com/DanielChappuis/reactphysics3d/issues
Thanks a lot for reporting the issues that you find. It will help us correct and improve the library.